The quest to find Philae
Rosetta and Philae teams continue to search for the current location of the lander, piecing together clues from its unexpected flight over the surface of Comet 67P/Churyumov-Gerasimenko after its initial landing on 12 November.


While Rosetta continues to study the ever-changing comet from a distance, the mission teams have been trying to narrow down the location of Philae on the comet nucleus using a variety of data, including imaging, magnetic field, and radio wave measurements.
Philae first touched down at the Agilkia landing site on the head of Comet 67P/C-G at 15:34 GMT on 12 November 2014, confirmation arriving back at Earth via Rosetta 28 minutes later. Unfortunately Philae’s harpoons did not deploy and the ice screws alone proved insufficient to secure the lander at Agilkia. As a result, the lander rebounded for an additional two-hour flight before finally coming to rest at a site now known as Abydos.

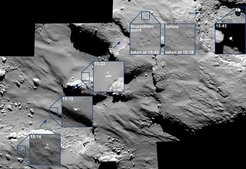
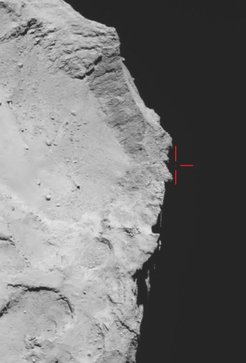
Both Rosetta’s navigation camera and the high-resolution OSIRIS camera successfully identified the first touchdown point, with Philae’s down-looking ROLIS camera providing high-resolution views of the location from as close as 9 metres altitude. The bouncing lander was then identified in OSIRIS and NAVCAM images shortly after it had left Agilkia. Somewhat later, another OSIRIS image was thought to show Philae above the horizon of the large depression known as Hatmehit on the comet’s head.
, with what is thought to be Philae above the rim of the large depression (marked). The image has been used to guide subsequent lander search efforts, and provides the basis for trajectory reconstructions.")
Magnetic field measurements from Philae’s ROMAP provided further details on subsequent events as the lander flew above the comet, including precise timing of the various contact points[EB5]. Initially, the lander flew in a stable orientation, but is then thought to have struck a surface feature at 16:20 GMT, after which it tumbled. A third touchdown occurred at 17:25 GMT, followed by a much shorter bounce of just a few minutes, before Philae finally arrived at Abydos at 17:32 GMT. Overall, Philae is thought to have travelled more than a kilometre from its initial contact point.
Images taken by its ROLIS and CIVA cameras, along with telemetry and data returned by its instruments during its nearly 60 hours of surface operations, have built up a picture of the final landing site. The lander is thought to be in a rough piece of terrain, tilted up against a cliff, and mostly in shadow.
In the days and weeks after landing, the OSIRIS team continued the search for Philae by making a detailed examination of new images of the comet as they came in. However, this proved to be a daunting task, given the rough terrain, the small size of the lander, and the distance of Rosetta from the comet.
The highest resolution images taken of the region of interest after Philae’s landing were part of a dedicated search that took place in mid-December, at distance of roughly 18 kilometres from the surface of the comet. At this distance, the OSIRIS narrow-angle camera has a resolution of 34 centimetres per pixel. The body of Philae is just 1 metre across, while its three thin legs extend out by up to 1.4 metres from its centre.
Taking into account the size, reflectivity, and orientation of Philae, along with the ‘point spread function’ or intrinsic resolution of the camera optics, the OSIRIS team expect Philae to be no more than a few pixels across in their images. Their examination of the head of Comet 67P/C-G revealed many initial candidates for Philae in the form of bright spots just a few pixels wide, as illustrated in the montage below:
 have subsequently been ruled out of consideration due to constraints including the reconstructed lander trajectory and topography at the landing site. The candidate at top left lies near to the current CONSERT ellipse.")
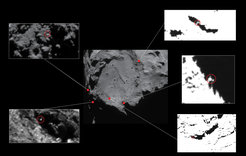
The question then is which, if any, of these candidates is the real Philae?
Fortunately, more information is available. The initial trajectory taken by Philae as it departed from Agilkia could be worked out from the OSIRIS images. This constrained the problem a bit, but only as far as the second bounce.
Fortunately, it was possible to narrow down the lander’s final location by using the radio signals sent between Philae and Rosetta as part of the CONSERT experiment after the final touchdown. Combining data on the signal travel time between the two spacecraft with the known trajectory of Rosetta and the current best shape model for the comet, the CONSERT team have been able to establish the location of Philae to within an ellipse roughly 16 x 160 metres in size, just outside the rim of the Hatmehit depression.

The ellipse represents the team’s current best estimate of the outer bounds of the likely location of Philae based on a number of simulations, but further work is being carried out to quantify things more rigorously in terms of the statistical likelihood of Philae being inside this region. The location of the ellipse also depends on the assumed shape model of the comet: as this is constantly being refined, some slight revisions in the positioning of the ellipse remain possible.
Nevertheless, the CONSERT ellipse rules out the majority of the candidates shown in the montage above. But there is at least one candidate near to the ellipse, as well as a number of other bright spots in the vicinity.


“We have identified several possible lander candidates in OSIRIS images, both inside the CONSERT region of interest and nearby,” says Holger Sierks, OSIRIS principal investigator at the Max Planck Institute for Solar System Research (MPS) in Germany.
Sierks adds: “That said, it is important to note that the viewing geometry during our December search was such that Rosetta was 90 degrees to the Sun-comet direction and in a terminator orbit. Philae’s solar panels could have been well illuminated, but still hidden in the rugged terrain from Rosetta’s perspective, making it difficult or impossible to spot.”
 of these could be the lander, the majority must be associated with surface features on the comet nucleus.")

Furthermore, and as the image above shows, bright features are common on the surface of the nucleus. The challenge of identifying Philae is made even more difficult by the fact that many of them are transient. For example, small-scale regions of the nucleus may “glint” under favourable illumination conditions, thus appearing in some images but not others.
To address this issue, scientists working with OSIRIS team member Philippe Lamy at the Laboratoire d’Astrophysique de Marseille (LAM) and the Institut de Recherche en Astrophysique et Planétologie (IRAP) in France began searching for special sets of OSIRIS images.
In particular, they looked for images taken before and after Philae’s landing under nearly similar illumination conditions, to reduce the chances of being fooled by transient surface features glinting. In that way, if something new appeared after landing, it could be Philae.
Scanning a broad area encompassing the expecting landing zone, the team identified a promising candidate that is seen on two images taken on 12 and 13 December, a month after the 12 November landing, but not on an image taken earlier, on 22 October. The candidate is also featured in the montage earlier in the post, at top-left.
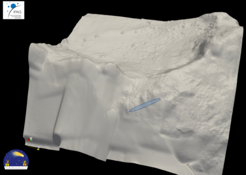
Additional images below show the region containing the candidate as seen on 22 October from a distance of 10 km from the centre of the comet (roughly 8 km from the surface), and then on both 12 and 13 December from 20 km from the centre (18 km from the surface).
 from a distance of about 10 km from the centre of Comet 67P/C-G, while the centre and right-hand images shows the same region on 12 and 13 December from 20 km (after landing). The candidate is only seen in the two later images.The illumination conditions are broadly similar in the three images and the same topography can be recognised in each case. The difference in distance at which the images were taken yields a difference in resolution and thus the December images have been resampled and interpolated to match the scale of the October image. As a result, the candidate covers more pixels calculated for a Philae-sized object seen by the OSIRIS narrow-angle camera from a distance of 18 km to the surface.")

The left-hand image shows the region as seen on 22 October (before the landing of Philae) from a distance of about 10 km from the centre of Comet 67P/C-G, while the centre and right-hand images shows the same region on 12 and 13 December from 20 km (after landing). The candidate is only seen in the two later images.
The illumination conditions are broadly similar in the three images and the same topography can be recognised in each case. The difference in distance at which the images were taken yields a difference in resolution and thus the December images have been resampled and interpolated to match the scale of the October image. As a result, the candidate covers more pixels calculated for a Philae-sized object seen by the OSIRIS narrow-angle camera from a distance of 18 km to the surface.
The ‘after’ images have been resampled and interpolated to be on the same scale as the ‘before’ image: this results in the bright spot covering more pixels than in the original data.
“Although the pre- and post-landing images were taken at different spatial resolutions, local topographic details match well, except for one bright spot present on post-landing images, which we suggest is a good candidate for the lander,” says Philippe Lamy, member of the OSIRIS team at the Laboratoire d’Astrophysique de Marseille, adding: “This bright spot is visible on two different images taken in December 2014, clearly indicating that it is a real feature on the surface of the comet, not a detector artefact or moving foreground dust speck.”

But is this really Philae? Unfortunately, it is impossible to be sure.
On one hand, analyses carried out at the Philae Science Operations and Navigation Center (SONC) at CNES suggest that this candidate satisfies a number of constraints regarding, for example, illumination and radio visibility in this region.
On the other, the candidate is located just outside the ellipse currently identified by CONSERT, although as mentioned earlier, improved shape models and continued CONSERT data analysis may alter its position.
Also, given the relatively long seven week interval between the ‘before’ and ‘after’ images, it is possible that this object is due to a physical change at that location on the nucleus, perhaps as fresher material was newly exposed. The relative lack of significant illumination in this region at the time argues that such changes are unlikely, but they cannot be completely ruled out.
Ultimately, a definitive identification of this or any other candidate as being Philae will require higher-resolution imaging, in turn meaning closer flybys. This may not be possible in the near-term, as issues encountered in navigating close to the comet mean that the opportunity to make flybys at significantly less than 20 km from the surface may be on hold until later in the mission. But after the comet’s activity has subsided, Rosetta should be able to safely operate in close proximity to the comet nucleus again.
The other possibility of further refining Philae’s location would come if the lander were to receive enough power to wake-up from its hibernation and resume its scientific study of 67P/C-G. Then, CONSERT could be used to perform additional ranging measurements and significantly reduce the uncertainties on the lander’s location.
At the moment, Philae is still in hibernation, but the mission team remain hopeful that, as the comet moves closer to the Sun along its orbit, the lander will receive enough power in the coming weeks or months to wake up and transmit a signal to Rosetta.
"The conditions for Philae's wake-up are becoming more and more favourable as the comet approaches the Sun," says Lander Project Manager Stephan Ulamec. "The team at DLR's Lander Control Center has continued to prepare long term operations for Philae and its instruments in the hope that it does wake up soon."
In the meantime, the team continue to search through all available data. Patrick Martin, ESA’s Rosetta mission manager says: “Follow-up work, such as the identification of candidates in other images taken from 20 km or less, along with improved reconstruction of the local topography, may help further narrow down the location of Philae.”
Matt Taylor, ESA’s Rosetta project scientist, adds: “Accurately locating the lander is of great scientific value, in particular for the joint orbiter and lander CONSERT experiment to get the best assessment of the interior structure of the comet nucleus. Knowing where Philae is would provide important context for the lander measurements and valuable information for its possible future operation. In the meantime, Rosetta is continuing to observe the comet from a range of distances as the comet’s activity increases.”
Notes and credits
This post was prepared in collaboration of ESA, CNES, DLR, LAM, and MPS.
The candidate discovered by the team of Philippe Lamy at the Laboratoire d’Astrophysique de Marseille (LAM) was identified by G. Faury of AKKA Technologies (a contractor of LAM and IRAP). E. Jurado and R. Garmier of CS-SI (a contractor of CNES) at the Philae Science Operations and Navigation Center at CNES (SONC), A. Herique and Y. Roger of the CONSERT team at Institut de Planétologie et d'Astrophysique de Grenoble, and P. Heinisch of the ROMAP team at IGEP, the Technical University of Braunschweig, were also involved.
CONSERT
CONSERT is the Comet Nucleus Sounding Experiment by Radiowave Transmission. The principal investigator is Wlodek Kofman of the Institut de Planétologie et d'Astrophysique de Grenoble (IPAG), France. The CONSERT instrument was designed built and operated by IPAG, LATMOS (Laboratoire Atmosphères, Milieux, Observations Spatiales, France) and MPS (Max Planck Institute for Solar System Research, Germany) and was financially supported by CNES, CNRS, UJF, DLR, and MPS.
OSIRIS
The scientific imaging system OSIRIS was built by a consortium led by the Max Planck Institute for Solar System Research (Germany) in collaboration with CISAS, University of Padova (Italy), the Laboratoire d'Astrophysique de Marseille (France), the Instituto de Astrofísica de Andalucia, CSIC (Spain), the Scientific Support Office of the European Space Agency (The Netherlands), the Instituto Nacional de Técnica Aeroespacial (Spain), the Universidad Politéchnica de Madrid (Spain), the Department of Physics and Astronomy of Uppsala University (Sweden), and the Institute of Computer and Network Engineering of the TU Braunschweig (Germany). OSIRIS was financially supported by the national funding agencies of Germany (DLR), France (CNES), Italy (ASI), Spain (MEC), and Sweden (SNSB), and the ESA Technical Directorate.
ROMAP
ROMAP is the Rosetta Lander Magnetometer and Plasma Monitor. The contributing institutions to ROMAP are: Institut für Geophysik und Extraterrestrische Physik, Technische Universität Braunschweig, Germany; Max-Planck Institut für Sonnensystemforschung, Göttingen, Germany; Hungarian Academy of Sciences Centre for Energy Research, Hungary; and Space Research Institute Graz, Austria. The co-principal investigators are Hans-Ulrich Auster (Technische Universität, Braunschweig) and István Apáthy, KFKI, Budapest, Hungary.
ROLIS
ROLIS (ROsetta Lander Imaging System) is a descent and close-up camera on the Philae Lander. It has been developed by the DLR Institute of Planetary Research, Berlin.
Rosetta is an ESA mission with contributions from its Member States and NASA. Rosetta’s Philae lander was provided by a consortium led by DLR, MPS, CNES, and ASI.